 Microsoft's Kinect Microsoft's Kinect 3D Vision uses two cameras placed a known distance apart to achieve what is called stereoscopic vision. Stereoscopic vision is a concept that humans utilize everyday.
Humans have two eyes spaced a set distance apart. When we focus on an object our brain is fed two images from slightly different vantage points. Similarly, robots that use stereoscopic vision must have two cameras - to simulate our eyes. If a robot with stereoscopic vision looks at an ob...
Read More -> | Ambient Light is non-directed light. Directional light is focused light, such as a flashlight or laser beam. Ambient light is a combination of scattered light rays and reflected light. A great example of ambient light would be the light you see on a cloudy day, or the light you see when in the shade under a building. The light reaching you is not coming directly from the sun, but rather is distorted or reflected in some way that it creates a more uniform "b...
Read More -> |
 Analog VS. Digital Signals Analog VS. Digital Signals Analog Signals are used to describe voltage levels from an instrument or device that is continuous. Unlike Digital Signals where the output is categorized into two “threshold” values (on / off) an analog signal’s output is applicable within a range of voltages. A great example would be an optical sensor.
Let’s say the optical sensor we have outputs higher voltage as the light level rises. The range of volt...
Read More -> |  Robocup is one embodiment of AI Robocup is one embodiment of AI Artificial intelligence (AI) represents the intelligence of machines, especially computers. Many refer to the field as "the study and design of intelligent agents” where an intelligent agent is a system that perceives its environment and takes actions that maximize its chances of success in accomplishing a given mission.
Early work in AI, in areas such as story understanding and commonsense reasoning, tried to tackle the problem head on,...
Read More -> |
 NASA's Curiosity, an autonomous vehicle sent to Mars. NASA's Curiosity, an autonomous vehicle sent to Mars. An Autonomous robot refers to one in which it is able to make complex decisions without human input. The level of autonomy a robot has will be dependent upon the sensors, mechanics, and software complexity in the device.
Robotic autonomy can range in large degrees. The more autonomous a robot is - generally means the software running the robot must increase in complexity. Engineers have spent decades trying to improve levels of robotic autonomy in hop...
Read More -> |  A CPU Chasis A CPU Chasis A CPU stands for Central Processing Unit. The CPU carries out the instructions in a program by performing basic arithmetic and logical processes. A CPU is different than a microprocessor in that it does not house all the required components that are necessary to properly operate – such as memory. CPU's are starting to contain more and more functionality similar to microcontrollers (many contain small banks of onboard memory), however most high performance robotic a...
Read More -> |
Battery Life of a robot can be dependent on a lot of factors. To name a few, the battery age, amount of charge cycles completed, battery chemistry, battery history, and power load can all affect how long your robot's battery lasts.
Probably the biggest factor when determining battery life is the battery chemistry. For most consumer level robots, battery chemistry has already been choosen by the manufacturer, so the second thing to be aware of is...
Read More -> |  Bluetooth Logo Bluetooth Logo Bluetooth is a wireless data transfer network that is primarily used for wireless mobile devices. Bluetooth, just like WiFi is restricted in how far away it can talk to other devices (sometimes as little as 15ft), and when enabled on some mobile systems, can drastically affect battery life. Unlike WiFi, Bluetooth is not designed to transmit high rates of data and thus its main commercial use is to transfer audio information.
...
Read More -> |
Boolean logic refers to a type of logic that is based on values that compromise of either "true" or "false" solutions. In the digital world, a boolean value can be translated from a true or false entity and instead represented with a 1 or 0. Generally a true = 1, and false = 0. Boolean values can be placed into a function, such as an AND function, and combined in a similarly fashion as would a Logic Gate to result in ...
Read More -> | Robot Calibration is the process of determining the actual values of kinematic and dynamic parameters of a robot. Kinematic parameters describe the relative position and orientation of joints in the robot while the dynamic parameters describe arm and Joint masses and internal friction.
Calibration is important process to improve the accuracy of movements and measurements.
Calibration can be done in many ways, u...
Read More -> |
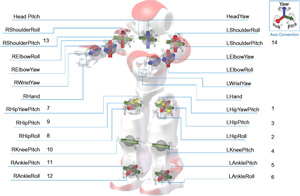 NAO Robot's 25 Degrees of Freedom NAO Robot's 25 Degrees of Freedom Degrees of Freedom (DoF) refers to how many "axes" of movement your robot has. A Joint axis is an imaginary line at which two parts of your robot move along or about. If a robot has two joints, then it is said to have two degrees of freedom. Similarly, if your robot can move in three different directions (Along the X, Y, and vertically in the Z), then your robot will have three degrees of freedom. The more degrees of ...
Read More -> | Analog VS. Digital Signals Digital Signals are signals that electrically fluctuate between set voltage levels. A digital binary signal fluctuates between two set voltages. In software, binary signals are generally referred to as a 1 or 0, and translate to the physical world as a low or high voltage. Most digital circuits fluctuate between 0-3.3v or 0-5v; the latter being most popular with hobbyist electronics.
The advantage of digital signals are that they represent a clea...
Read More -> |
 Dynamo - Schematic Drawing Dynamo - Schematic Drawing Electricity encompasses the principle that charged particles are attracted to each other. Most of the time we reference electricity specifically regarding the flow of electrons - and for our interests, we will stick to that.
So, what is the flow of electrons you may ask? Well, if we can remember back to our days in science and physics class, electrons are negatively charged particles which circle the nucleus of an atom. If we have the same amount of ...
Read More -> | An EMI stands for Electro-Magnetic Interference and can be a big problem in the fields of robotics. Examples of devices that use electromagnetic radiation to function are WiFi signals, radio transmissions, and GPS receivers – to name a few. Electromagnetic radiation encompasses a large portion of our world that we can't see or feel and we need a device to detect and interpret these signals.
EMI refers to a similar set of sign...
Read More -> |
 A Gripper End Effector A Gripper End Effector An End Effector is a technical term that is used to describe the point or device at the end of a robotic linkage. An end effector can represent a gripper, pointer,tool, etc.. and is usually the location where the robotic arm interacts with its environment. When calculating robotic arm movements, usually robots work backwards to determine intermediate Joint angles. As an example, if we wish to position the location and orienta...
Read More -> | Facial Recognition is a software application that allows the computer to identify a person based on a video or still image of their face. One way to accomplish this is to compare specific facial traits of a person's face to an existing database of images. The computer program analyzes each image and takes note of certain physical features - such as the location of the eyes, size and location of the mouth, and other noteable features. Once this is do...
Read More -> |
An Interrupt is a term that is used to describe an interruption of normal code execution needing immediate attention. An interrupt can be triggered via a piece of hardware (input pin), or it can exist in software such as a timer interrupt. An interrupt allows the software code to jump into a special routine that can quickly address a function that might otherwise not commonly occur or doesn't happen with any regularity. An example of a use of an interrupt is...
Read More -> |  Joints in a robotic arm Joints in a robotic arm A Joint is a flexible part of a robot that is designed to move, rotate, or translate in some way. Joints can be controlled (with a motor), or uncontrolled (free moving). Two main types of joints are translational and rotational.
A translational joint causes each part of the joint to move in a sliding fashion to one another. A translational movement is one of extension or retraction, such as a sliding door or antenna.
A rotational joint is one which turns an...
Read More -> |
A Logic Gate is an array of components arranged inside an IC (integrated circuit) that perform some sort of Boolean logic function. Typical logic gates include an AND, OR, or NOT gate. These compare the digital voltages of their input pin(s) and output a value that corresponds to how the gate functions.
For example, let's say you have a TTL compatible AND gate that had both its inputs set to a value of 1 (a voltag...
Read More -> |  Intel 8742, an 8-bit microcontroller that includes a CPU running at 12 MHz Intel 8742, an 8-bit microcontroller that includes a CPU running at 12 MHz A Microcontroller (MCU) is a programmable device that contains various sets of hardware elements that are integrated together into a single IC (Integrated Circuit). These individual elements, such as memory and I/O (input and output peripherals) can be utilized in conjunction with one another to accomplish various tasks that a single central processing unit (CPU) couldn't do alone.
Some microcontrollers can take analog input directly in, as wel...
Read More -> |
 Network Cable Network Cable A Network Cable is used to exchange information between robots, other sensor devices, or computers. Network cables can be replaced with a wireless network, however network cables offer certain advantages that can only be available to a wired connection.
Networks that are wired can transfer data at faster rates, over longer distances, and in many situations are much less susceptible to EMI noise. In the case of fiber ...
Read More -> |  Remote control Remote control Remote Control refers to the ability to provide control to a robot from a remote location. Remote is a relative term however, and can apply to short distance, say from across the room, to large distances, such as across the world or through outer space.
The Remote Control most of us are familiar with is used to control our TV's, stereos, or DVD players, but that's not to say those devices can't control robots as well. These particular remote con...
Read More -> |
 RGB model RGB model The RGB stands for Red Green and Blue and is the most common way to generate different colors. If you look at your monitor very closely (try looking though a magnifying glass) you will notice three colors, which will be red green and blue. These three colors are clumped together in what is called a pixel. Based upon the intensity / mixing of each of these red green and blue colors, you can generate most colors within the spectrum. Monitors use this technique to g...
Read More -> | There are two main ways to transmit binary data: in serial or parallel. Serial Communication uses one data pin to transmit signal data, whereas parallel uses multiple pins. Serial data transmission is slower than parallel, however it has the advantage of only needing one signal wire to transmit data. Serial communication requires that each device know the rate and structure at which the serial data is being sent over the data line. Typically this is ...
Read More -> |
 Serial Port Serial Port A Serial Port is a piece of hardware that is used to transfer information between two devices using serial communication. A typical serial port interface is a 9 pin D-sub connector, but can come in many different types of form-factors. USB is also a type of serial port and stands for Universal Serial Bus. USB is a much more complicated standard than the typical 9-pin D-sub serial port you might find on a desktop computer (RS-232 s...
Read More -> |  Willow Garage's office map as created by PR2 Willow Garage's office map as created by PR2 A SLAM (Simultaneous localization and mapping) is a technique used by robots and Autonomous vehicles to build a map within an unknown environment, or to update a map within a known environment, while keeping track of their current location. So basicly you attempt to build a map of your environment while moving, to identify where you are in relation to your sorroundings.
In recent years, the success of single-robot SLAM ha...
Read More -> |
Often times when a mechanical switch or button is used for input to a robot, the contacts usually don't close as cleanly as you might think. When the contacts internal to the switch are closed quickly to complete the circuit, there is almost always a "bouncing" effect where the metallic parts briefly separate as they flex and rebound off one another. Although this effect occurs extremely quickly (~1/100th of a second), it is slow enough that a ...
Read More -> | Traction is a description of how well a robot's control surface maintains contact with the environment it wishes to interact with. Higher traction material such as rubber are generally selected for gripping and wheeled surfaces, whereas low traction materials (like plastic) might be chosen to reduce friction. Although traction is not a terribly important topic to be aware of in the field of robotics, traction can play an important role when understanding where y...
Read More -> |
 USB Logo USB Logo USB stands for Universal Serial Bus and is a standard that describes both the physical constraints of the hardware connections as well as the communication protocol that each USB device must adhere to. USB is used for short range networks (cable length of less than 15 ft.), that mainly support peripheral devices such as USB hard drives, flash memory sticks, or other input devices like a mouse or joystick. The USB standard has undergone a few overhauls over its life...
Read More -> |  WiFi Logo WiFi Logo WiFi is short for “Wireless Fidelity”, and is a term used to describe a computer network that is being transmitted over radio waves. WiFi networks can exist between local computers called a WLAN (Wireless Local Area Network) or can be connected to the internet to provide greater accessibility. WiFi is a wireless version of the wired Ethernet network.
Since WiFi networks operate in the radio spectrum, the data is broadcast in all directions, and therefore ...
Read More -> |