ROS Installation for Windows Users
 By Anna Sandler
By Anna Sandler
ROS is a Linux-base robot operation system.
Although there is a Windows-based installation of ROS, it is experimental and not recommended. We will focus on how to install a virtual machine with Ubuntu and ROS on windows machine.
The best way to install ROS on Windows is using VirtualBox, which allows and installation of another operation as a virtual machine on Windows based computers.
To make things clear before we start – ROS is not an operating system per se, it is a bunch of services and drivers designed to answer the specific needs of robots. (such as navigation, manipulation, etc. and specific drivers)
Ubuntu is the recommended Linux operation system for ROS.
You can download a pre-installed ROS (Fuerte version) with Ubuntu (12.04 version) snapshot of the VirtualBox from here password: adminuser
If you want hands-on experience, you can follow the next instructions for manual installation:
Pre-requisites for ROS Installation
Follow the next steps to install Ubuntu on Windows using VirtualBox:
1. Make sure you have at least 8 GB free space; (internally, or on external hard drive)
2. Download Ubuntu’s installation-CD image from: http://www.ubuntu.com/download (make sure you are downloading version 12.04 and up)
3. Download and Install the VirtualBox from https://www.virtualbox.org/wiki/Downloads
4. On the main screen of VirtualBox – create a new virtual machine. (click on “New” button.)
5. After creating the new virtual machine, mount the downloaded Ubuntu-CD in the Virtual Box (using CD/DVD menu) and follow the on-screen installation instructions.
6. Make sure the Virtual Machine network is configured properly. If you fail to connect to the internet, check your DNS and routing configuration of the VirtualBox host.
7. Install all updates: Press the start button or lunch the Dash home -> search for “update” -> update all software to the newest version;
How to install ROS on Ubuntu
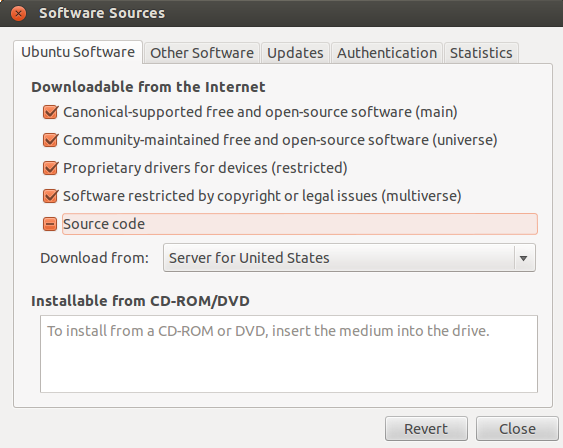
1. After Ubuntu is installed, and running, we will need to add new source to the software sources - Go to Software Center -> Edit -> Software Sources
2. Make sure all the first four checkboxes are checked: mail, universe, restricted and multiverse;
3. Create and setup ROS repository in order to accept packages from ros.org:
Open Terminal, and execute the following command: sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu precise main" > /etc/apt/sources.list.d/ros-latest.list'
If your Ubuntu version is different from “precise” (12.04), change the “precise” to your version name, for your convenient:
- Quantal- for 12.10 version;
- Oneiric- for 11.10 version;
- Natty- for 11.04 version;
- Maverick- for 10.10 version;
- Lucid- for 10.04 version;
- Hardy- for 8.04 version;
4. Add ros builder as a trusted software provider: In terminal type: wget http://packages.ros.org/ros.key -O - | sudo apt-key add
5. Re-index software providers: sudo apt-get update
6. Install ROS full version: ROS, rx, rviz, robot-generic libraries, 2D/3D simulators, navigation and 2D/3D perception: sudo apt-get install ros-fuerte-desktop-full
7. Environment setup: execute the following command:
- echo "source /opt/ros/fuerte/setup.bash" >> ~/.bashrc
- . ~/.bashrc
8. Install rosinstall package for easy download ROS source tree packages and rosdep package for easy installing system-dependencies for the compiling source: sudo apt-get install python-rosinstall python-rosdep
9. Define an overlay environment. Copy and create a new overlay in a local folder from /opt/ros/fuerte: rosws init ~/ros/fuerte_workspace /opt/ros/fuerte
10. Add the sandbox directory of this workspace to the ROS_PACKAGE_PATH environment variable: source ~/ros/fuerte_workspace/setup.bash
11. Optional - if you have skipped the rosws step, you can manually set the environment variable ROS_PACKAGE_PATH to a local folder, to protect ROS system packages: export ROS_PACKAGE_PATH=$ ROS_PACKAGE_PATH :/home/[user-name]/ros/ros-pkg This command should be used every time you open a new terminal window. Alternatively, you can edit the .bashrc file to include the command: just open the ~/.bash file and add the export command to the end of it.
12. Creating a sandbox directory for new packages:
-
mkdir ~/ros/fuerte_workspace/sandbox
- Change .rosinstall file: rosws set ~/ros/fuerte_workspace/sandbox
13. Confirm the ROS__PACKAGE_PATH. Type: echo $ ROS_PACKAGE_PATH The result should be: /home/[user-name]/ros/fuerte-workspace/sandbox:/opt/ros/fuerte/share:/opt/ros/fuerte/stacks
14. Configure ROS host name environment variable as localhost for testing purposes on a local machine:
- export ROS_HOSTNAME=localhost
- export ROS_MASTER_URI=http://localhost:11311
15. Make sure that you’ve downloaded the following source control tools:
-
sudo apt-get install subversion
- sudo apt-get install mercurial
- sudo apt-get install ssh
- sudo ntpdate ntp.ubuntu.com
- sudo apt-get install chrony
16. Now you are ready to install packages/stacks just run the command: rosinstall target_path stack/package_name source_path
17. You might want to connect your virtual machine to robots using USB. To do that, make sure /dev/ttyUSB.0 exists, if it is not found execute this:
1. Go to VirtualBox settings and make sure that the SerialPort and USB.2.0 are enabled, in case of Virtual Box Additional pack installation is required, you can download the pack from here: http://dlc.sun.com.edgesuite.net/virtualbox/4.1.20/
2. Make sure you download the right version of your VirtualBox installation.
3. Go to Preferences of the Virtual Box -> Extensions -> choose the installation file.
4. Add the USB to the USB filter;
5. Choose device host in Serial Port tab.
6. Add permisions to /dev/ttyUSB0 driver:
• sudo adduser USER_YOU_WANT_TO_ADD dialout
• sudo reboot
That's it. It wasn't easy, but if you followed all the steps, you should have a virtual machine running ROS.